
A few things I've built over the years
Team Members: Anup S, Abhinav Goel, Aditya Suresh Prabhu
Role: Group Leader
Skills picked up: Embedded C, 8051 Micro-controller programming, Physical Prototyping, Blank Circuit Board Soldering
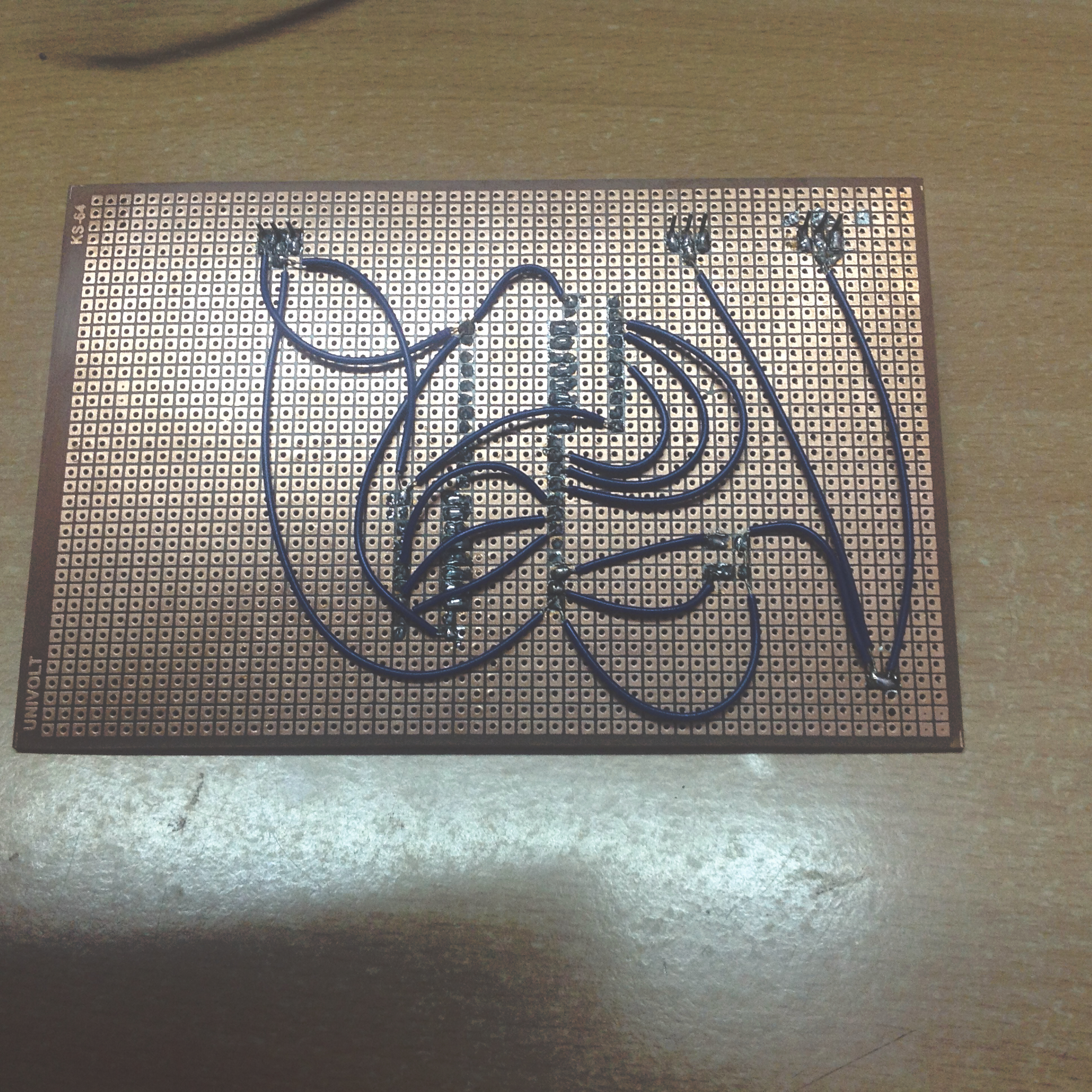
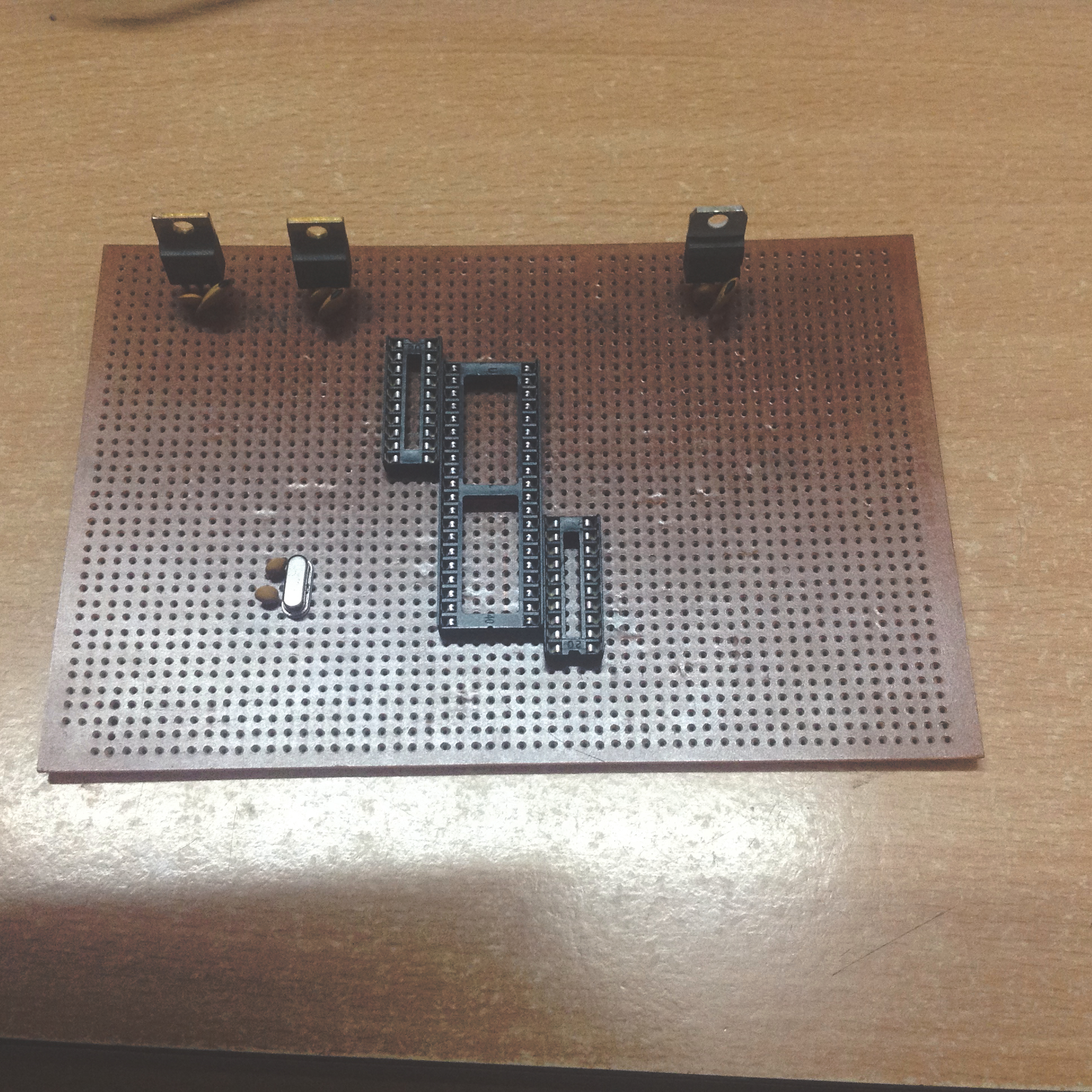
As an addition to our Micro-controller theory course, we tried to build a 2-axis Gimbal using a Gyroscope, a couple of servos and an 8051 Micro-controller. This was my first attempt at making circuit boards. Although this was barely a working prototype, it worked well to guide my curiosity towards embedded systems and system design in general.
Team Members: Anup S, Ganeshsiva Subramaniam, Daksha Srivastava
Role: Group Leader
Skills picked up: Arduino, Quick Prototyping
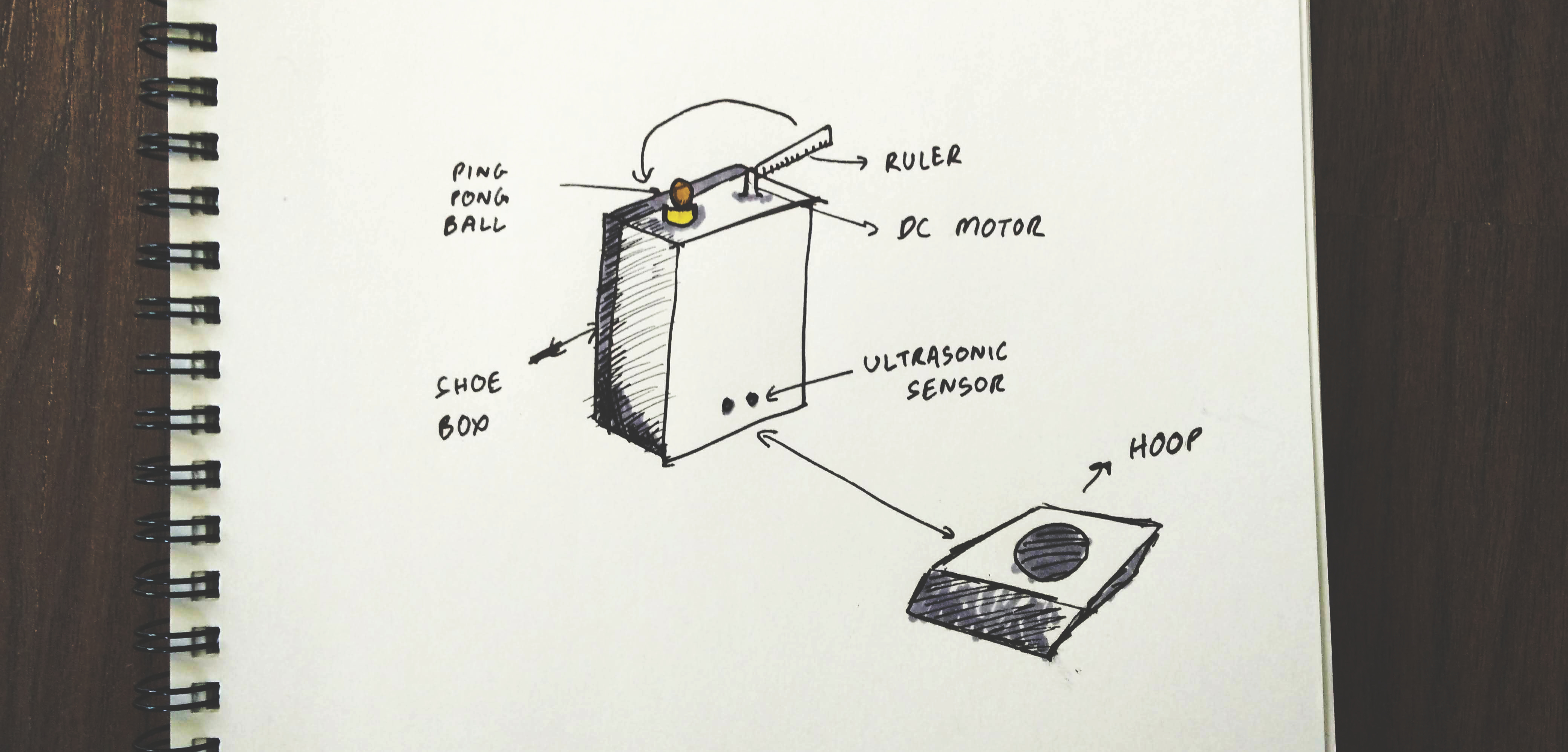
We built a ball shooter(hitter?) under 3 hours using materials at hand. The ultrasonic sensor was used to detect the distance between the shoe box and the hoop. By using a small little formula to convert the distance into RPM of the DC motor, we realised we could control the torque of the arm. By making sure that the starting point of the hitting arm(ruler) was constant, we could consistently hit the target due to the change in torque relative to the distance. A small roll of tape was used to keep the ping pong ball in place.
Team Members: Abhinav Goel, Anup S
Role: UI and Algorithm Design
Skills picked up: Python, GUIs in Python using Tkintr
Pareto Analysis is an important method used to calculate trade-offs in basic algorithms to optimise digital circuits. We built an application in Python designed to take in data from an Excel sheet and to calculate the Pareto point(most optimal point) in the data and to also find the dominant parameters based on user requirement. More documentation and code can be found in the link below
Team Members: Anup S
Skills picked up: MatLAB, Computer Vision
An attempt at compiling a basic Computer Vision toolkit during our theoretical course. You can find the repository below. Feel free to add to the toolkit.